 Mercredi 25 Juin 2025 21023 visiteurs Dernier message : |
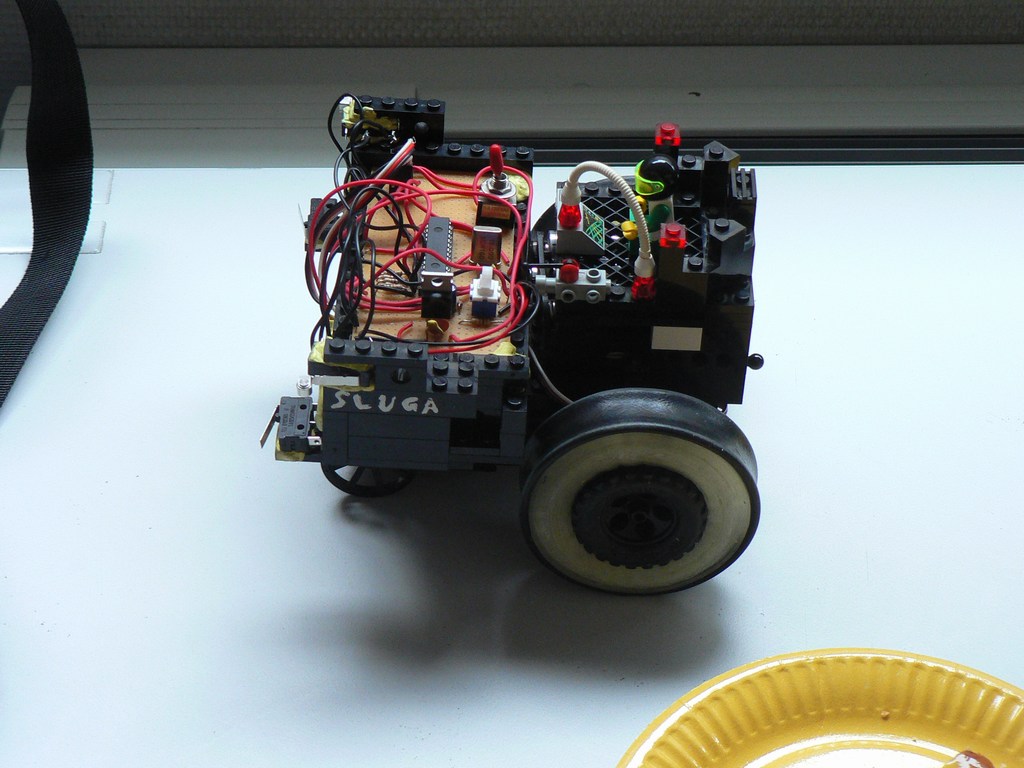
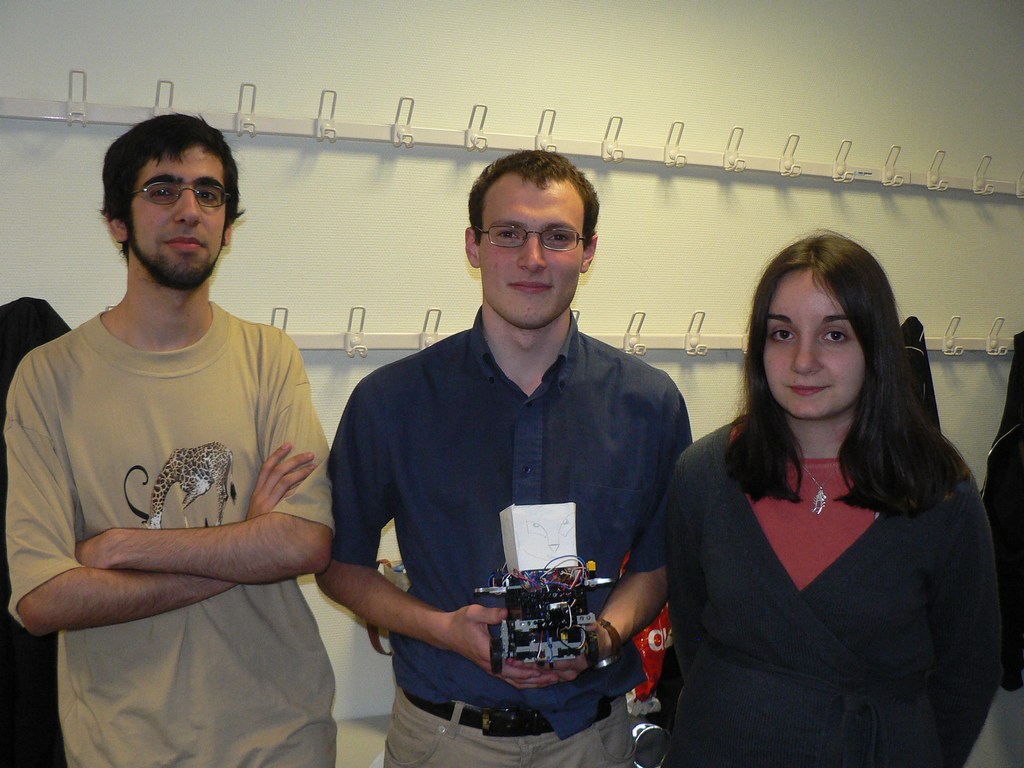
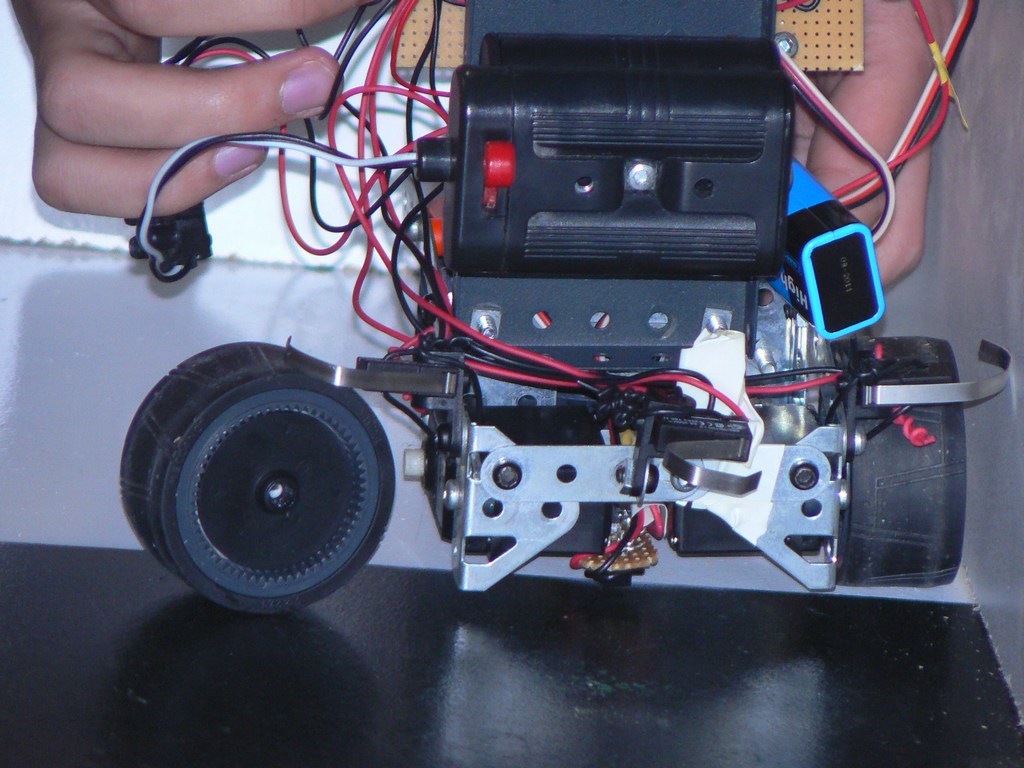
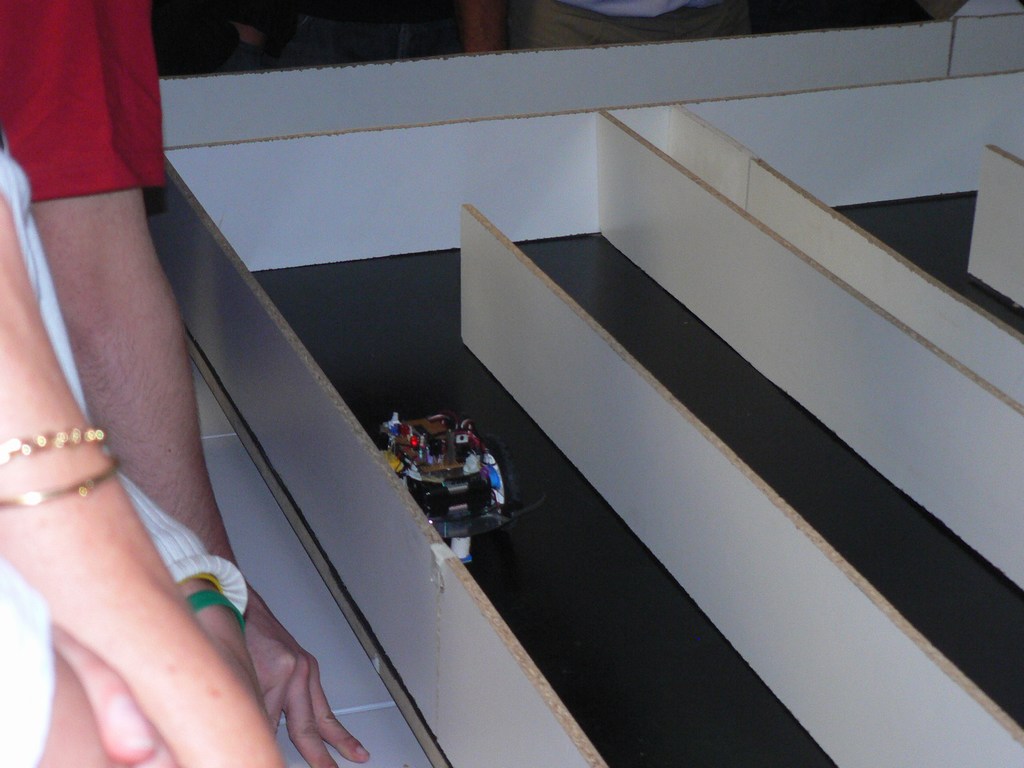
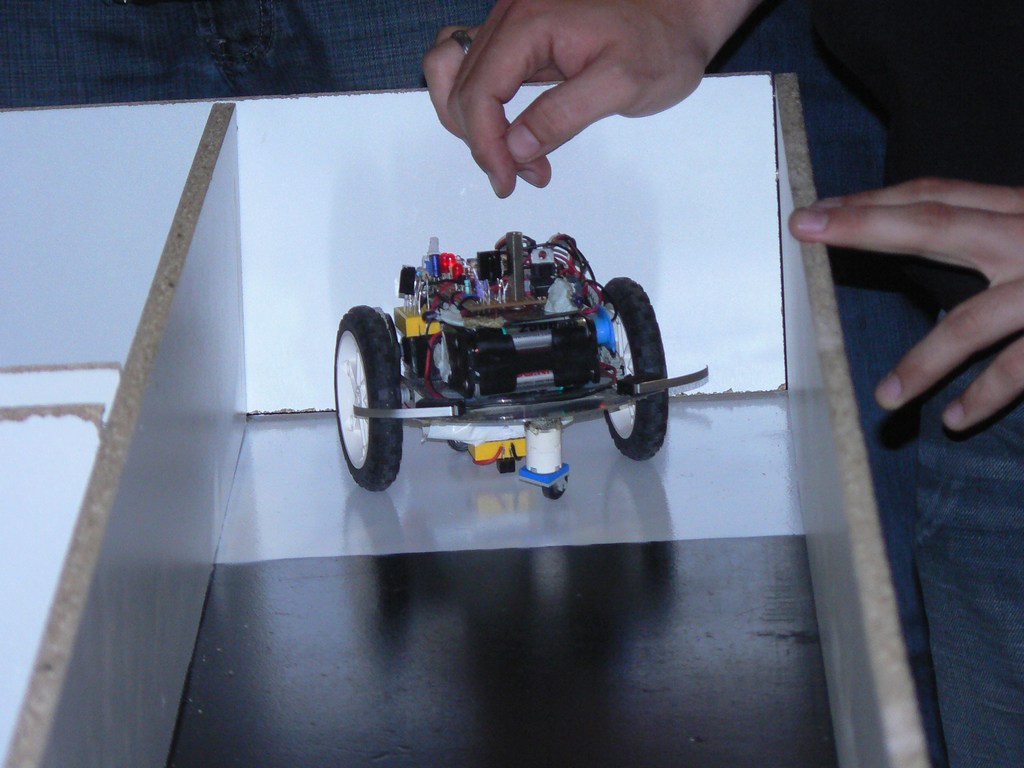
Coupe Robotisen 2007Pour sa deuxième édition, la coupe Robotisen organisée par le CEA, n'a pas changé son principe. Il s'agit de proposer aux étudiants de 2ème année un sujet commun pour leur TIPE, de les encadrer et enfin d'organiser une compétition pour donner un but à leur travail.Le sujetVoici le sujet tel qu'il a été proposé aux participants :I. Régles:Chaque équipe composée de deux ou trois étudiants en deuxième année de classe préparatoire ISEN, doit créer un robot capable de se déplacer dans un "labyrinthe" symétrique. Les meilleurs robots seront désignés lors du challenge robot-ISEN. Pour ceci, des matchs seront organisés, le robot le plus rapide à effectuer son parcours sera déclaré vainqueur de l'épreuve.II. Le labyrinthe:Le labyrinthe est formé d'un système de couloirs avec des angles à 90°, des angles obtus et des lignes droites. Le tracé est symétrique, les robots doivent effectuer un demi-tour à leur arrivée dans la zone centrale, et retourner à leur point de départ le plus rapidement possible.Des lames de bois blanches, de 15cm de haut et 1cm de large, séparées de 25cm, servent de murs. Le sol est peint en noir mat. Le sol de la zone centrale et du point de départ est peint en blanc. III. Le robot:Le robot doit respecter quelques contraintes pour être homologué.1) Dimensions: Le robot doit tenir dans un carré de 15cm de côté, ou le périmétre total du robot doit être inférieur à 60cm et pouvoir se déplacer dans le couloir. Il peut atteindre au maximum 25cm de haut. Aucune limitation n'est imposée quant à la forme du robot, mais les équipes veilleront à ce que celui-ci ne représente aucun danger pour les arbitres et autres spectateurs. 2) Energie: Seules les batteries sont acceptées (moteur thermique, etc interdits). Les équipes sont libres de choisir le modèle qu'elles désirent utiliser : piles, batterie de modélisme ... Il est cependant recommandé de ne pas utiliser de piles 9V (carrées) car celles-ci ont tendance à poser certains problèmes de chute de tension pour l'alimentation des moteurs. 3) Déplacement: Bien que des servomoteurs sont distribués pour la réalisation du robot, les équipes peuvent choisir d'utiliser d'autres types de moteurs (pas-à-pas et/ou continus) à leurs frais. Les challengers 2007 ... et leurs robots
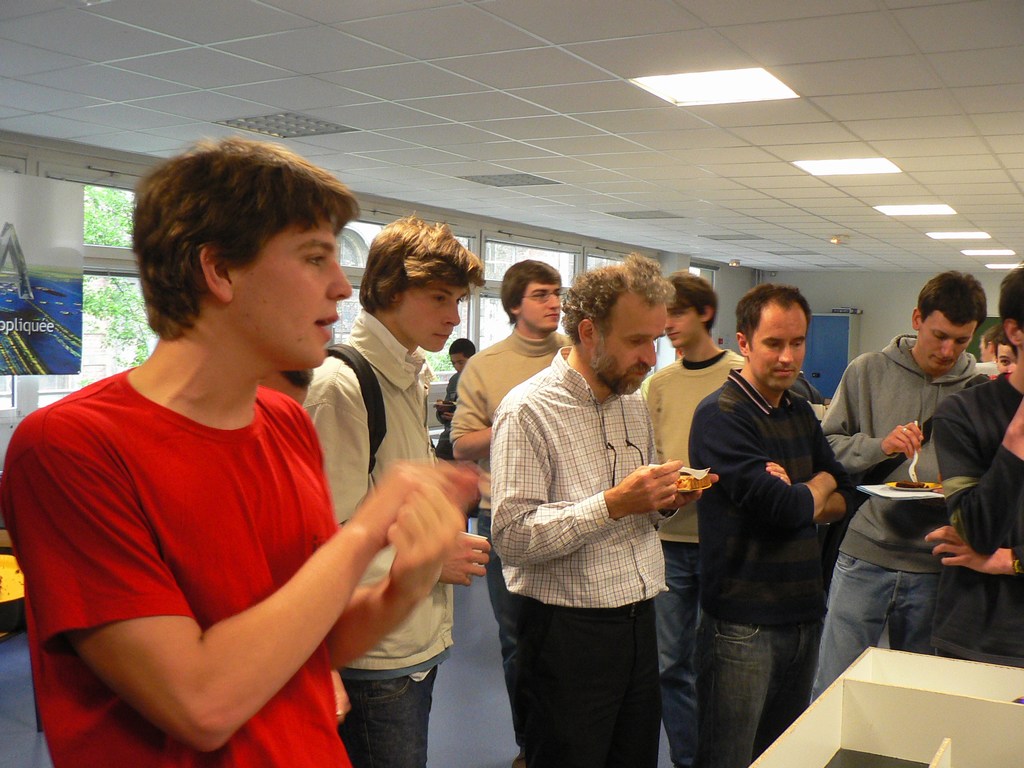
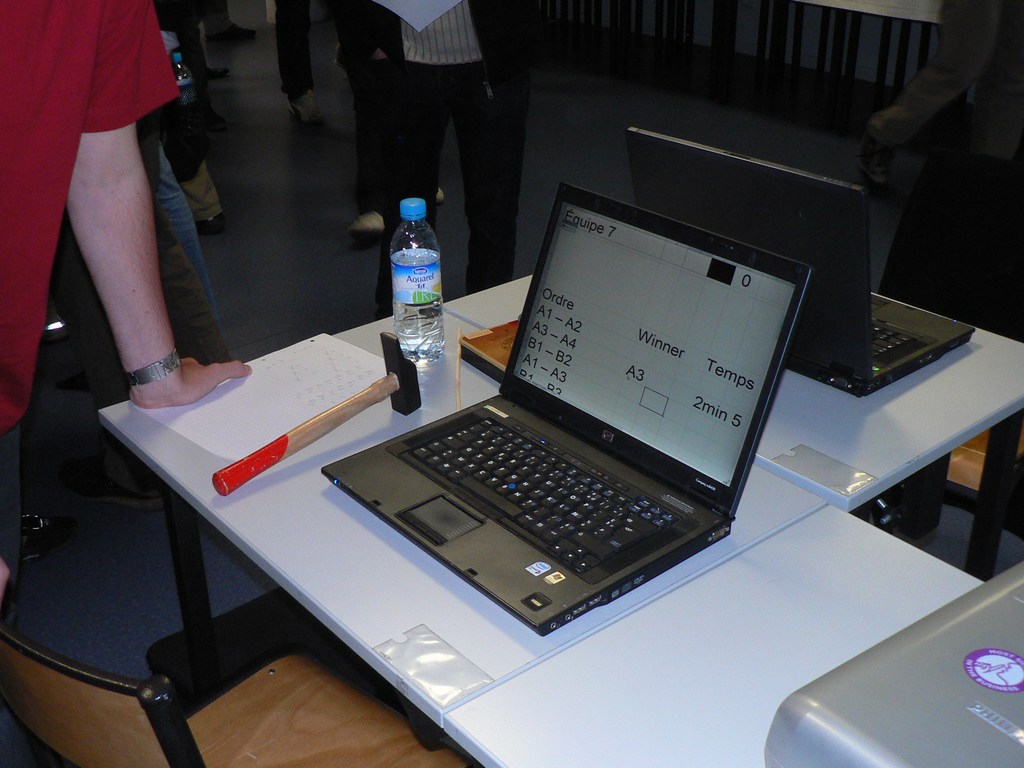
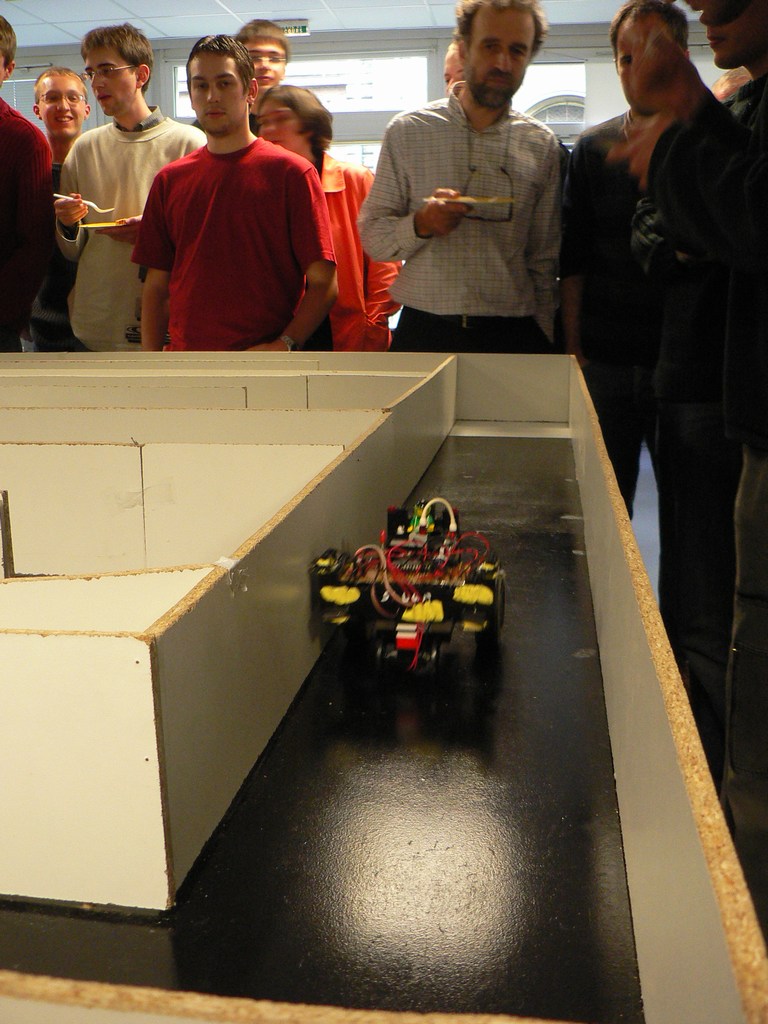
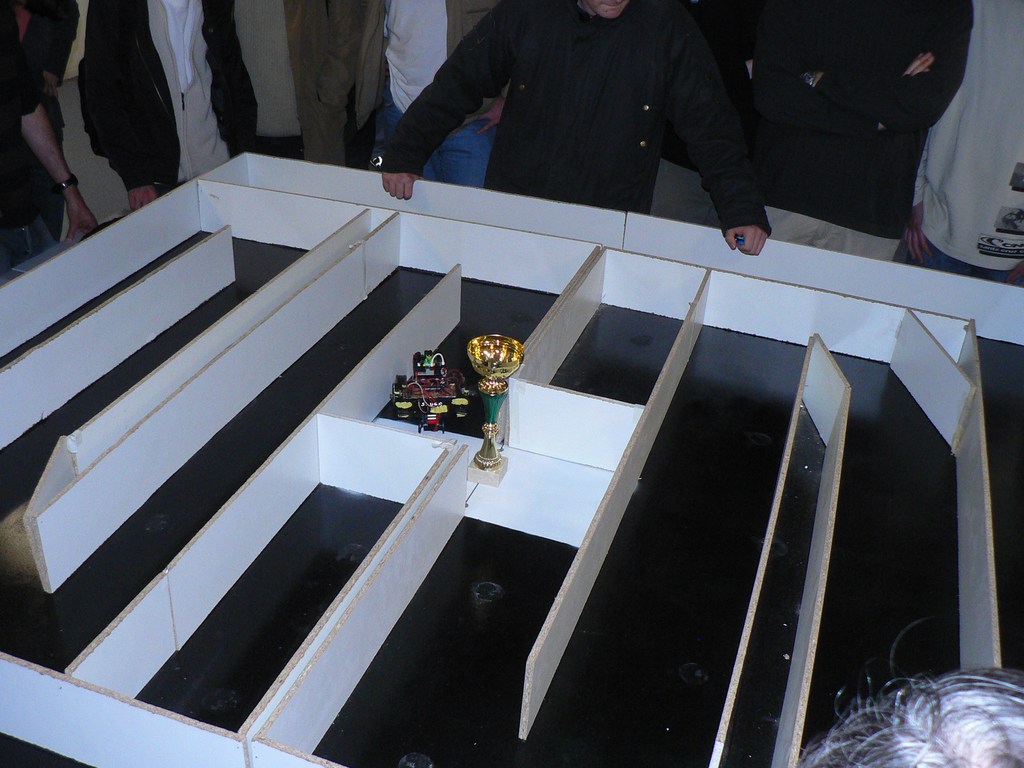
Résumé de la coupeLa coupe s'est déroulée dans la salle de DS de l'Isen, spécialement aménagée pour l'occasion par l'équipe du CEA. Simultanément le "pot de fin d'année N2" a été organisé dans ces mêmes lieux, ce qui a permis de sensibiliser une grande partie de la promo de deuxième année au travail de leurs collègues.L'invitation lancée par mail a sucité la curiosité de quelques personalités de l'Isen. Ainsi nous avons été honorés par la présence de : Mme Authenac, Mr De Baudus, Mme Grumetz, Mr Harbonnier, Mr Haw, Mr Kaiser, Mr Reille, Mr Serot, Mr Van Malleghem, Mr Verhaeghe ... La liste est longue mais j'en oublie sûrement quelques-uns ! Rapidement les manches ont été lancées, il y a eu de nombreuses surprises, des robots capricieux. L'équipe 2 n'a malheureusement pas pu rouler à cause d'une défaillance d'un capteur. Dommage car le robot avait démontré lors des tests qu'il était capable d'arpenter les couloirs sans toucher les murs. Ceci notamment grâce à une modulation d'amplitude de l'émission infrarouge. Le Robotcopter a tenté de prendre son envol, apparemment le rotor d'anticouple devait être mal branché, l'appareil n'a réussi qu'a tourner sur lui-même dans la zone de départ. En tout cas ses concepteurs ont réussi à apporter une bonne touche d'humour et d'insolite ! Après plusieurs blocages face aux murs, pertes de roues, mais aussi quelques belles performances en terme de rapidité, les manches ont continué à s'enchaîner jusqu'à la finale. Celle-ci fut d'une grande intensité, elle opposa l'équipe 7 à l'équipe 1. Tout le monde s'est laissé prendre au jeu pour encourager les deux robots finalistes. Le suspense a été maintenu jusque dans la dernière ligne droite, l'équipe 1 ayant pris un peu d'avance au départ, elle a été rattrapée suite à un petit souci mécanique. Finalement c'est l'équipe 7 qui l'a emporté avec moins de 5 secondes d'avance ! Voici donc au terme des manches, le classement :
Le tout en imageL'organisation
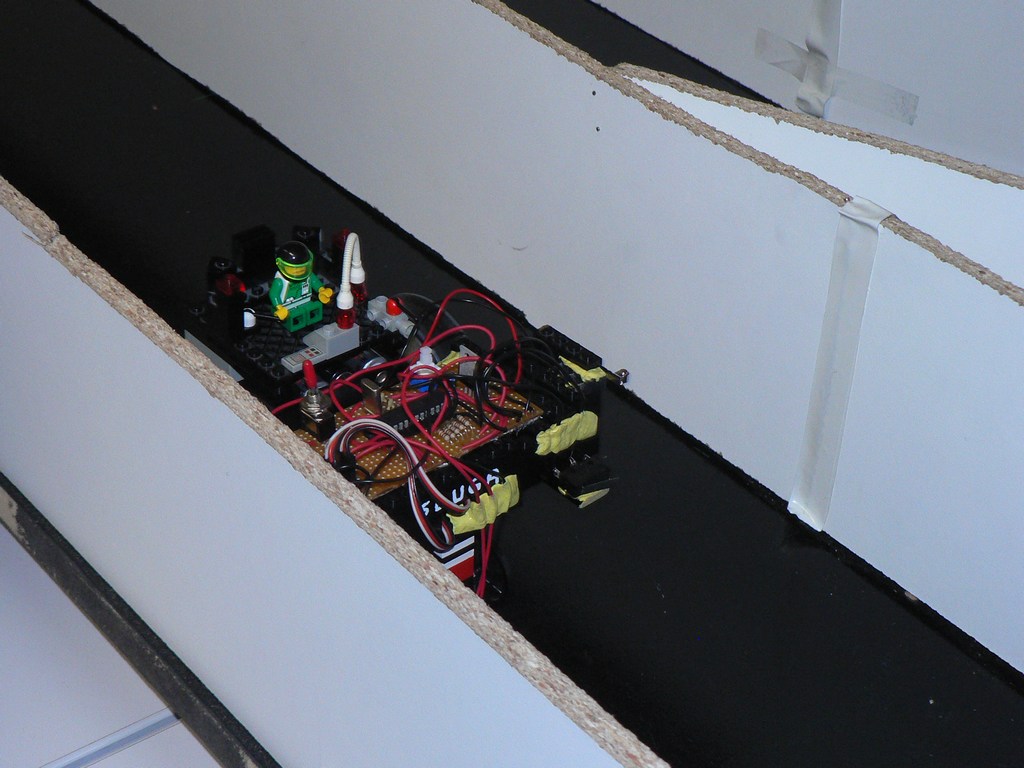
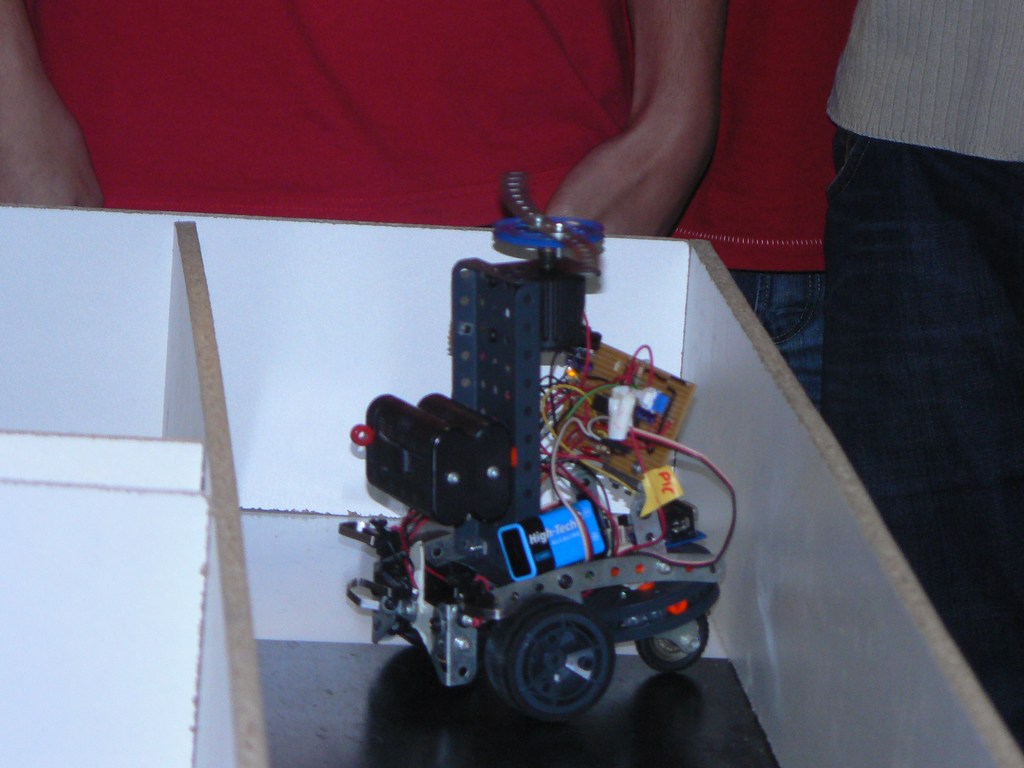
Les manches
Toutes ces photos sont disponibles dans l'archive téléchargeable ICI 31/05/2007 - Samuel Tranchet
|







































Page coupe2007 affichée 2322 fois. Mise à jour le 05/06/2007 .
CEA Isen - http://cea.isen.free.fr/ - page générée en 1.685 secondes
Copyright © 2006-2025 - Site créé par Mastersam - Tous droits réservés.
Admin
CEA Isen - http://cea.isen.free.fr/ - page générée en 1.685 secondes
Copyright © 2006-2025 - Site créé par Mastersam - Tous droits réservés.
Admin
| Référencement gratuit |